CAN 2.0A/B <-> USB Konverter Sniffer Stick (Prod. Nr. #620)
Merkmale:
Extrem klein ! Außenabmessungen (mm) 25 B 13 H 50 L !
CAN 2.0A/B - Seitig: 10 Kbps ... 1 Mbps
USB2.0 - Seitig: 3 Mbps
CAN 2.0A/B:
High speed CAN 2.0A & 2.0B Bus
Slope-Control Mode to Reduce EMI
Thermal Shutdown, Current Limiting
ISO 11898 Standard, CAN 2.0A & 2.0B
Listen Mode only & Autobaud - CAN Seiteg nur Lesen möglich
USB 2.0:
Nach USB Spezifikation 2.0 & 1.1
virtueller Com Port data transfer rate 3 Mb/s
Unterstützt "Remote wake-up" und power management
Einfachste Installation
Software:
Klartext Modus für einfachste Kommunikation via ein beliebiges Terminalprogramm.
Error Buffer Overflow LED (wenn PC USB zu träge ab CAN Extended Frame 1 Mbps bei Busvollauslastung kann vorkommen)
Betriebstemperatur:
-5..+70°C
Außenabmessungen:
25 B 13 H 50 L (mm) Plastikgehäuse Material: ABS-94HB
Treiber Software USB:
Windows 8
Windows 7
Windows Vista x64
Windows XP x64
Windows Server 2003 x64
Windows Vista
Windows XP
Windows Server 2003
Windows 2000
Windows ME
Windows 98
Linux
Mac OS X
Mac OS 9
Mac OS 8
Windows CE.NET (Version 4.2 and greater)
Kurzbeschreibung
Der Konverter ist ein leistungsstarkes CAN-Werkzeug für Entwicklung, Service, Test
und Wartung von CAN basierenden Systemen. CAN Sniffer Stick ist geeignet für die
Online-Beobachtung des Busverkehrs und deren Protokollierung.
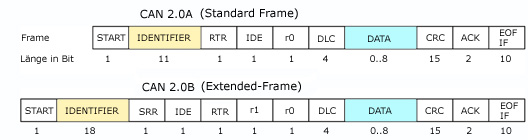
Der Konverter unterstützt 11- und 29-Bit-Identifier (CAN 2.0A/2.0B) in Listen-Mode.
(Listen Mode - kein Senden von Ack-Bit und Errorframes, dadurch keine Beeinflussung
des CAN-Systems durch den Konverter).
CAN Baudrate wird automatisch von dem Konverter erkannt, kann aber auch fest eingestellt
werden zusammen mit anderen Parameter - Konverter Setup Menu
CAN Sniffer Stick ist optimal geeignet zur Untersuchung des CAN Datenbuses in Fahrzeugen.
Der kleine, dongleartige Konverter kann einfach an jeden USB-Port eines PC angeschlossen
werden. Die Daten Anzeige erfolgt in jedem beliebigen Terminal Programm.
Mehr Informationen finden Sie in der Doku.
Ein Datennetzwerk auf der industriellen Feldebene. An diesem Netzwerk können über Interfaces
verschiedene I/O Module, Sensoren, Regler, usw. mit einem Industrie PC verbunden werden.
Für die Verbindung aller Teilnehmer wird nur eine Leitung oder Kabel benötigt.
Durch ein Feldbussystem werden Installationskosten eingespart.
Ein weiterer Vorteil eines Feldbussystems ist, dass es ständig ausgebaut und erweitert
werden kann.
CAN-Feldbussystem
CAN steht für Controller- Area- Network.
CAN wurde von Bosch für die fahrzeuginterne Kommunikation entwickelt.
Merkmale vom CAN Feldbus:
- Datenrate von 1 MBaud bei einer Netzausdehnung bis zu 50 m
- Beidseitig abgeschlossenes Netzwerk.
- Busmedium ist Twisted-Pair-Kabel.
- Nachrichtenorientiertes Protokoll. Die Nachricht wird mit einer Nachrichtenkennung
(Identifier) gekennzeichnet. Alle Netzknoten prüfen anhand des Identifiers, ob die
Nachricht für sie relevant ist.
- Broadcasting, Multicasting. Alle Netzknoten erhalten gleichzeitig jede Nachricht.
Daher ist eine Synchronisation möglich.
- Echtzeitfähigkeit. Definierte max. Wartezeit für Nachrichten hoher Priorität.
- Priorisierung von Nachrichten. Der Identifier setzt die Priorität der Nachricht fest.
Dadurch können wichtige Nachrichten schnell über den Bus übertragen werden.
- Multi-Master-System. Jeder Busteilnehmer kann seine Nachricht beginnen, wenn
der Bus nicht belegt ist. Bei einem gleichzeitigen Senden von Nachrichten setzt sich
der Teilnehmer mit der höchsten Priorität durch.
- Einfache Kommunikationsdienste. Mit dem CAN-Bus kann man lediglich Nachrichten senden
und Nachrichten anfordern.
- Kurze Blocklänge. Die Datenlänge einer CAN-Nachricht beträgt 8 Byte.
- Datenübertragung mit kurzer Fehlererholzeit. Durch mehre Fehlererkennungsmechanismen,
werden verfälschte Nachrichten mit großer Wahrscheinlichkeit erkannt.
Wird ein Fehler erkannt, so wird die Nachrichtensendung automatisch wiederholt.
- Sicherstellung netzweiter Datenkonsistenz. Gestörte Nachrichten werden als fehlerhaft gekennzeichnet.
- Lokalisation fehlerhafter oder ausgefallener Stationen. Das CAN-Protokoll beinhaltet eine
Funktionsüberwachung von Netzknoten. Netzknoten, die fehlerhaft sind, werden in ihrer Funktion
eingeschränkt oder ganz vom Netzwerk abgekoppelt.
- Buszugriff nach dem CSMA/CA Verfahren.
- unbegrenzte Anzahl von Teilnehmern an einem Bus (theoretisch), bis zu 64 (praktisch).
Fehler in der Busverkabelung z.B.:
- fehlerhafte Busabschlüsse
- nicht ausreichende Sendepegel
- hohe Übergangswiderstände infolge Alterung/Korrosion
- unzureichende Signalgüte, zu lange Stichleitung
- Verwendung falscher Leitungen
- ungünstige Leitungsführung, Störung durch starke Felder
CAN-Bus nach ISO 11898 (High-Speed)
- mit 11 oder 29 Bit Identifier (CAN 2.0A und 2.0B)
- Baudraten 10k, 20k, 50k, 62.5k, 125k, 250k, 500k, 800k, 1000k
- Baudratenerkennung alle Baudraten, + 5k und 100k


)
)
